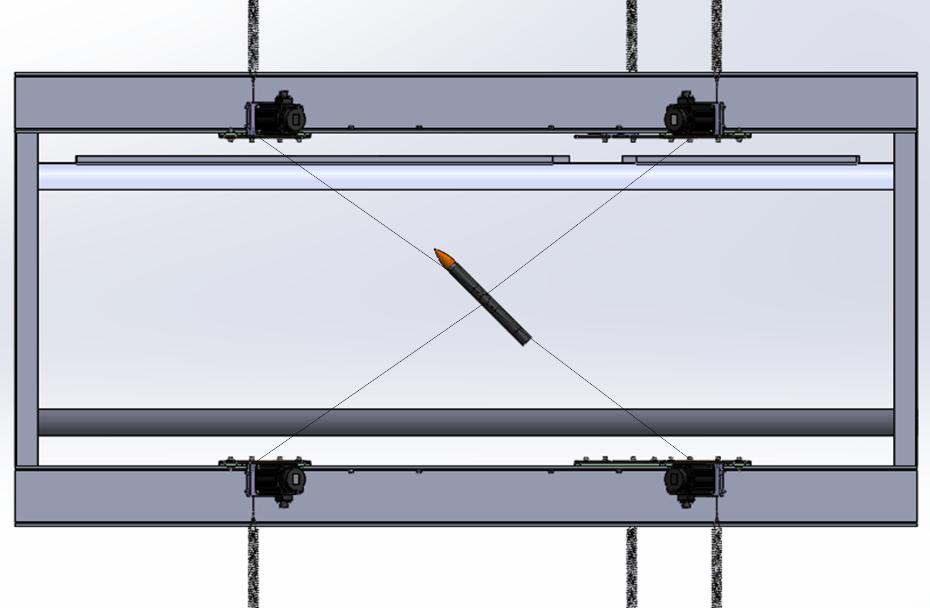
The aerodynamic forces caused by the unsteady flow over a wire-mounted slender axisymmetric body is investigated in wind tunnel experiments. The long cylindrical body is fitted with an ogive shape forebody and includes a synthetic jet actuator module at the juncture between the forebody and the cylinder. Both the forebody and actuator module are designed such that they are azimuthally 360˚ rotatable. The test model is suspended in the tunnel by eight mounting steel wires, each comprising miniature in-line force sensors that are used to measure the instantaneous forces and moments and are connected to eight servomotors, respectively. The main controller system commands the individual motors, capable of driving the model to perform a dynamic six degrees of freedom (6-DOF) motion. The controller includes a PID closed-loop control that utilizes six motion-capture cameras to accurately control the desired trajectory of the model. The present investigation is conducted at high angles of attack (up to 65˚). Studies have shown that, when a long model with sharp front tip increases in pitch, a symmetric vortex pair forms over the body. However, when the angle is sufficiently high, the vortex pair becomes asymmetric which causes the model to experience unbalanced side forces and yawing moments. Due to such phenomenon, under certain conditions the model can become unstable with angular oscillations. The present research demonstrates that the flow is extremely receptive to actuation at high incidence and the model’s angular stability can be either restored or disrupted.
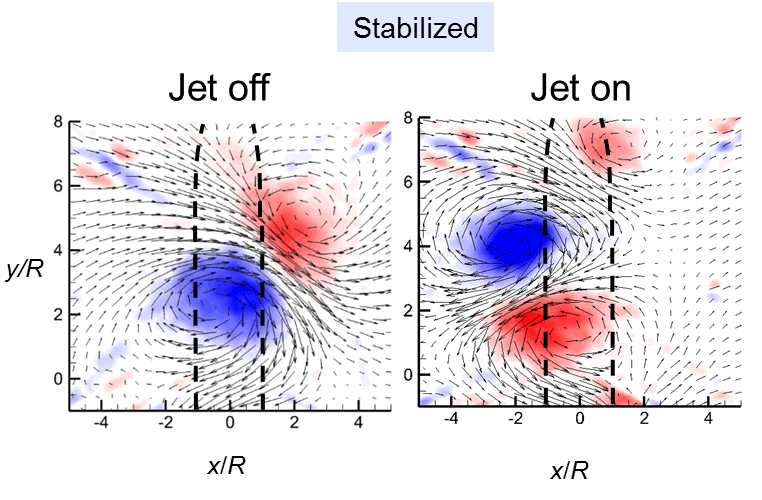 Figure 2. Stabilization by jet
|
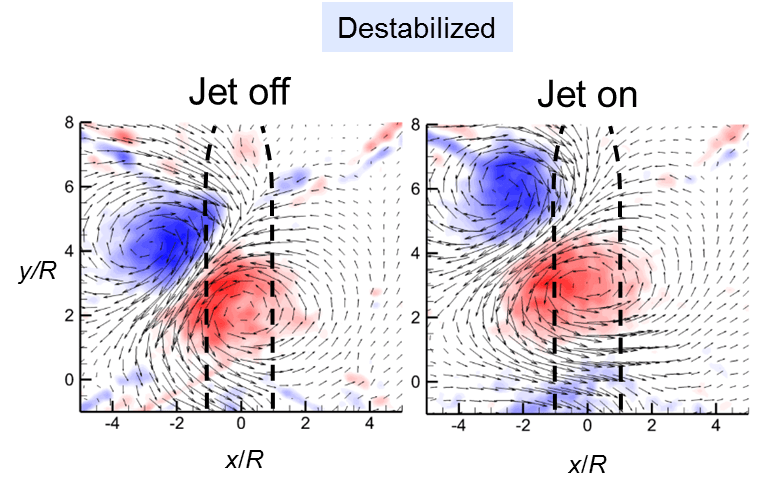 Figure 3. Destabilization by jet
|
Figure 4. Synthetic jet actuation
Supported by ARO